محققان دانشگاه Case Western Reserve یک طراحی جدید برای ساخت ربات های منعطف ارائه کردهاند که در آن یک ربات که مبتنی بر اریگامی است را به ثبت رسانده اند. این ربات می تواند در آینده در یک خط اسمبلی، جراحی و یا در فضا مورد استفاده قرار گیرد.
Kiju Lee، استاد برجسته ی مهندسی مکانیک و هوافضا می باشد که آزمایشگاه ایشان به سمت مدل های سه بعدی که قابلیت خم شدن، منبسط و منقبض شدن و پیچ خوردن را دارند، حرکت می کند. این مکانیزم جدید، TWISTER نامیده می شود. برای ساخت این ربات از قطعات پرینت سه بعدی استفاده شده است. استفاده از پرینت سه بعدی ساخت قطعات پیچیده برای ربات منعطف را امکانپذیر میکند.
TWISTER از برج تابیدهی اریگامی که توسط یک هنرمند ژاپنی طراحی شده است، الهام گفته شده است. این برج از چند اریگامی برای تشکیل ساختار یک برج استفاده می کند. این نوع طراحی برای کابردهای مختلف در رباتیک باز تولید شده است.
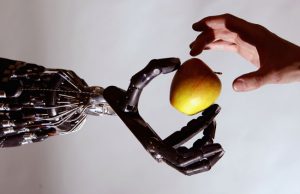
تیم Lee سه ورژن کوچک از برج ها را ترکیب کرده و به یک برج بزرگتر تبدیل کرده اند و همانند سه انگشت مخالف هم آن ها را کنترل می کنند تا بتوانند عمل چنگ زدن را انجام دهند مثل برداشتن و حرکت دادن تخم مرغ، میوه و … .
مکانیزم های رباتیک مختلفی در طراحی این ربات مورد آزمایش قرار گرفته است. مکانیزم حرکتی این ربات منعطف بر اساس کابل است، هرچند که مکانیزمهای دیگر مثل استفاده از آلیاژهای حافظهدار نیز در حال بررسی است. رباتها به طور معمول دارای بدنه و پوشش سخت هستند و این باعث میشود که استفاده از آنها در نزدیکی انسانها خطرناک باشد. به همین خاطر سعی میشود که رباتهای سخت از انسانها دور نگه داشته شوند. یکی از مزیتهای استفاده از ربات منعطف این است که میتواند در نزدیکی انسانها و در تعامل با آنها و با خطر بسیار کمتری کار کند.
دکتر لی و همکارانشان در حال تلاش برای ساخت نمونه کوچک این ربات نیز هستند. کاربرد چنین رباتی میتواند در جراحیهای ساده بدن یا لاپراسکوپی باشد. در حال حاضر تجهیزاتی که برای لاپراسکوپی استفاده میشود، شامل اجزای سخت است که بعضا به بافتهای بدن آسیب میرساند. کاربرد دیگری که این ربات خواهد داشت برای استفاده در فضا است. از آنجا که حجم و وزن تجهیزات برای ارسال به فضا بسیار مورد اهمیت است (به دلیل هزینه بالای هر ماموریت فضایی)، این ربات منعطف با توجه به حجم و وزن کم خود، گزینه مناسبی برای چنین کاربردی است.
درباره ربات منعطف و نرم الهام گرفته از اریگامی بیشتر بخوانید.