انکودر (encoder) یک وسیله الکترومکانیکی است که یکی از تجهیزات مهم اتوماسیون صنعتی محسوب میشود. انکودر یک سنسور حرکت است که حرکت مکانیکی را به سیگنال الکتریکی تبدیل میکند. همچنین در بسیاری از صنایع از آن به عنوان فیدبک (feedback) استفاده میشود. در لغتنامه فارسی انکودر را رمزگذار معنی کردهاند. علت آن این است که حرکت را رمزگذاری کرده و آن را به صورت کدهای دیجیتال در میآورد. بعد از آن با اتصال انکودر به یک دستگاه رمزخوان، مقدار حرکت ثبت شده توسط آن قابل خواندن میشود. انکودر وسیله ارتباطی است که حرکت یک دستگاه متحرک را مشاهده کرده و می توانند به تعیین سرعت یا موقعیت موتور یا سایر تجهیزات متحرک کمک کنند.
بطور کلی انکودر وسیله یا فرایندی است که دادهها را از یک قالب به قالب دیگر تبدیل می کند. انکودرها در صنایع دسته بندی و دستگاههای صنعتی که نیاز به اندازه گیری سرعت و موقعیت است مورد استفاده قرار میگیرند. همچنین در کارخانجات فولاد، دستگاههای نساجی، دستگاههای برش چوب، دستگاههای تولید کاشی و سرامیک و کارخانجات سیمان کاربرد بسیاری دارد. از انکودر برای کارهای تحقیقاتی نیز استفاده میشود. این وسیله میتواند سرعت، مکان، جهت و شمارش را اندازهگیری کند. از تکنولوژیهایی که در انکودر استفاده میشود میتوان به مغناطیسی، مقاومتی، مکانیکی و اپتیکال اشاره کرد که بیشترین تکنولوژی تبدیل حرکت که استفاده می شود، اپتیکال است.
انواع انکودرها
انکودرها از لحاظ و جهات مختلف به دستههای مختلفی تقسیمبندی میشوند. از لحاظ نوع ساختمان به دو دسته خطی و چرخشی یا دورانی تقسیم میشوند. از لحاظ نوع فناوری به کار رفته به سه دسته نوری، مغناطیسی و خازنی تقسیم میشوند. همچنین از لحاظ نوع عملکرد به دو گروه افزایشی و مطلق تقسیم میشوند که در ادامه به بررسی هر یک میپردازیم.
تقسیمبندی بر اساس ساختمان
انکودر خطی

انکودر خطی که به آن خط کش پالسی یا خط کش دیجیتالی نیز گفته میشود. عمده عملکرد آن مشابه به انواع افزایشی است، با این تفاوت که صفحه به کار رفته در آن به جای اینکه گرد باشد به صورت یک خط مستقیم است. در انکودر خطی، دقت اندازه گیری را فاصله بین سوراخ ها تعیین میکند. به عنوان مثال اگر فاصله بین سوراخ ها ۰.۱ میلیمتر باشد، دقت آن برابر با ۰.۱ میلیمتر است، یعنی به ازای هر ۰.۱ میلیمتر حرکت، یک پالس را ثبت میکند.
انکودر چرخشی یا دورانی
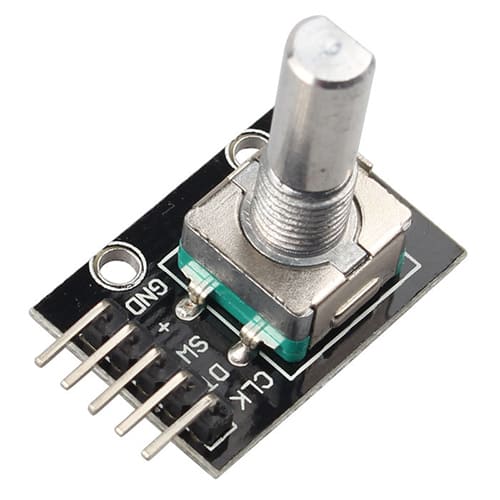
این نوع انکودر، بر روی شفت قرار گرفته و توسط همین شفت به موتور متصل میشود. این انکودر دارای یک محفظه و یک چرخ موتور میباشد که این چرخ حول محور در حال چرخش است که حرکت چرخشها اطلاعاتی حاوی تعیین سرعت و موقعیت را میدهد. نکته حائز اهمیت این است که نحوه عملکرد داخلی همه انکودرها مانند یکدیگر است.
تقسیمبندی بر اساس فناوری
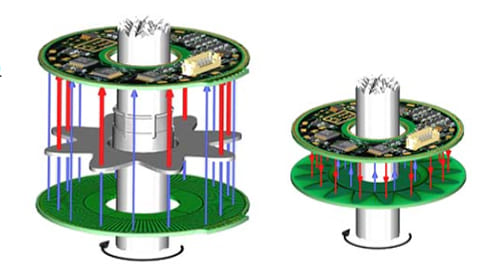
انکودر نوری
انکودر نوری از یک یا چند فرستنده، گیرنده و صفحه شیاردار تشکیل شده است. نحوه کار آن اینگونه است که وقتی فرستنده نوری را ارسال میکند، اگر در مقابل آن شیاری باشد نور به گیرنده میرسد و اگر این شیار وجود نداشته باشد این نور به گیرنده نمیرسد. به طور مثال فرض کنید یک گیرنده و فرستنده را در اختیار داریم. اگر نور به گیرنده برسد، عدد ۱ را به میکروکنترلر میفرستد و اگر این نور به گیرنده نرسد، عدد صفر را میفرستد و این به این معنی است که نوری دریافت نشده است.

حال اگر انکودری داشته باشیم که ده شیار داشته باشد، اگر شفت یک دور بچرخد، ۱۰ بار عدد ۱ و ۱۰ بار عدد ۰ نمایش می دهد. این انکودرها به دلیل سرعت عمل بالایی که دارند میتوانند شتاب را نیز محاسبه کنند. از مزایای این نوع انکودر، میتوان به دقت و اطمینان بالا و همچنین هزینه نسبتا پایین اشاره کرد. اما این نوع معایبی نیز دارد و آن هم این است که توانایی کار کردن در شرایط نامناسب مثل گرد غبار و ارتعاشات را ندارد.
انکودر مغناطیسی

انکودر های مغناطیسی با استفاده از اثر هال و رلوکتانس کار میکنند. این نوع برخلاف انواع نوری، قابلیت کار در شرایط نامناسب را دارند. همچنین نسبت به انکورهای نوری دمای کمتری دارند و از مقاومت بیشتری برخوردارند.
انکودر خازنی
انکودر خازنی، جدیدترین نوع است که به همین دلیل نسبت به دو نوع نوری و مغناطیسی کمتر در صنعت رواج دارد. این انکودر از لحاظ مقاومت به شرایط سخت محیطی همانند نوع مغناطیسی بوده و از لحاظ دقت، مانند نوع نوری است. همچنین این دسته، قابلیت تشخیص حرکت و تبدیل به سیگنال های استاندارد موجود و رایج در اتوماسیون صنعتی را نیز دارا می باشند.
تقسیمبندی بر اساس عملکرد
انکودر افزایشی

در انکودرهای افزایشی، یک سری پالس یکنواخت و پشت سر هم متناسب با چرخش مکانیکی مورد نظر تولید می شود. تنها ایراد این نوع، مدیریت حافظه میکروکنترلری است که باید تعداد پالسها را بشمرد. اعداد سیکل ها در هر دور چرخش نیز، به وسیله فاصله فیزیکی علائم روی دیسک چرخان و کیفیت نور مورد استفاده محدود میشود. در این انکودر اطلاعات مربوط به سرعت، با اندازهگیری زمان بین پالس ها و یا شمارش تعداد پالس ها در یک زمان معین، میسر است. اغلب از انکورهای افزایشی برای اندازهگیری موقعیت، از دو کانال خروجی که با هم ۹۰ اختلاف فاز دارند، یعنی از دو فرستنده و گیرنده، استفاده می کنند. در این نوع همچنین در صورتی که خطای شمارش وجود داشته باشد، قابل ارزیابی نبوده و این خطا انباشته میشود.
انکودر مطلق
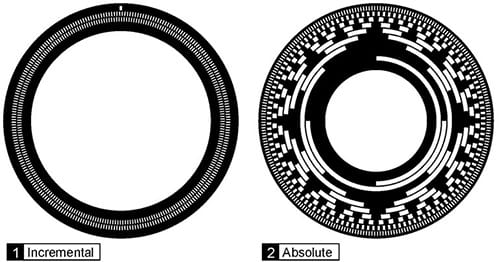
انکودر مطلق یک فرستنده و گیرنده دارد و بین آن صفحهای شامل شکافهایی است که نور از آن میگذرد. از آنجا که این شکافها همگی با هم متفاوتاند، امکان تعیین دقیق زاویه در این نوع وجود دارد. این انکودر اطلاعاتی شامل جهت چرخش و سرعت و شتاب و موقعیت دقیق را حتی بعد از خاموش و روشن شدن در اختیار ما میگذارد. این یک مزیت نسبت به انواع افزایشی است چون بعد از خاموش شدن انکودر افزایشی برای فهمیدن موقعیت جسم باید انکودر دوباره تنظیم شود.
انکودر یکی از مهمترین اجزای اندازهگیری در طراحی مکانیزم های رباتیک محسوب میشود که دقت بسیار خوبی دارد و اگر نیاز به دانستن موقعیت اجزای مکانیکی یا کنترل آنها دارید، به آن نیاز خواهید داشت.